לאחרונה גדלה אצלנו אוכלוסיית חיות הבית. שני השרקנים שהבאנו התגלו כשרקניות ובהריון מתקדם, בקיצור שמח, יש הרבה פיות להאכיל, וצורך לעשות את זה כמה פעמים ביום. אז בהיותי מהנדס בלתי נלאה חשבתי איך לבנות מכונה שתעשה את זה באופן אוטומטי.

חיפשתי כל מני רעיונות לפתרון, ובסוף החלטתי החלטתי להתבסס על מיכל של קורפלקס עם מנגנון לחלוקה שקניתי ב60 בחנות לכלי בית
השלב הראשון היה להחליף את הידית המקורית במנוע. השתמשתי במנוע dc זול שמשמש במכוניות צעצוע, ויש לו גיר שמוריד את המהירות. הדפסתי ציר שמתאים בצד אחד לגלגל של המיכל ובצד השני למנוע. הדפסתי גם מתאם שיקבע את המנוע לתושבת של המיכל, אבל בדיעבד גם חתיכת פלסטיק היתה מתאימה, וממילא הכל חובר בהרבה דבק חם.

השלב הבא הוא מערכת השליטה מרחוק. לצורך כך לקחתי לוח מבוסס esp32 וצרבתי עליו תוכנה של tasmota. הגדרתי בטרמינל טיימר שיכבה את המנוע באופן אוטומטי אחרי 3 שניות בעזרת הפקודה “PulseTime1 3”
את המנוע חיברתי בעזרת טרנזיסטור שמבצע מיתוג של המתח למנוע לפי השרטוט הבא. אפשר להשתמש בכל טרנזיסטור NPN. הדיודה נועדה להגן על המעגל מפני מתחים הפוכים שמתפתחים על הסליל של המנוע.
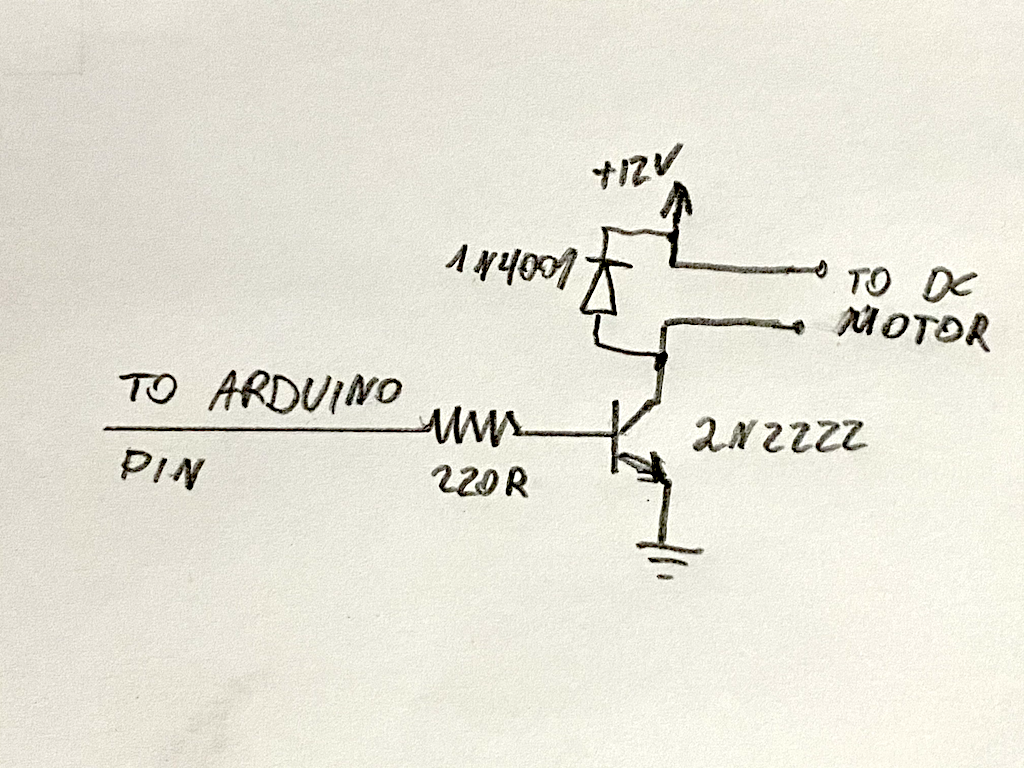

הייתי צריך לערוך כמה נסיונות עד שמצאתי שיש צורך במתח של 12v למנוע. הוא מסתובב גם ב5v אבל כשהמיכל מלא באוכל הוא תחת עומס ויש צורך בהרבה כח כדי להזיז את הגלגל ולשחרר את האוכל.
הרכבתי את כל המנגנון בעזרת שני ברגים לכלוב.

הדבר האחרון שנשאר היה לחבר צינור שיוביל את האוכל למקום הרצוי. במקרה התקלקל השואב אבק, אז השתמשתי בצינור שלו, והדפסתי משפך שמתאים לו בדיוק, אבל כל צינור שרשורי ומשפך מהטמבוריה יעבדו. שוב הרבה דבק חם פתר את בעיות ההצמדה.
לסיום חיברתי לחצן להפעלה ידנית של המנוע וכן אוטומציה ב homeassistant שמפעילה את המאכיל 3 פעמים ביום